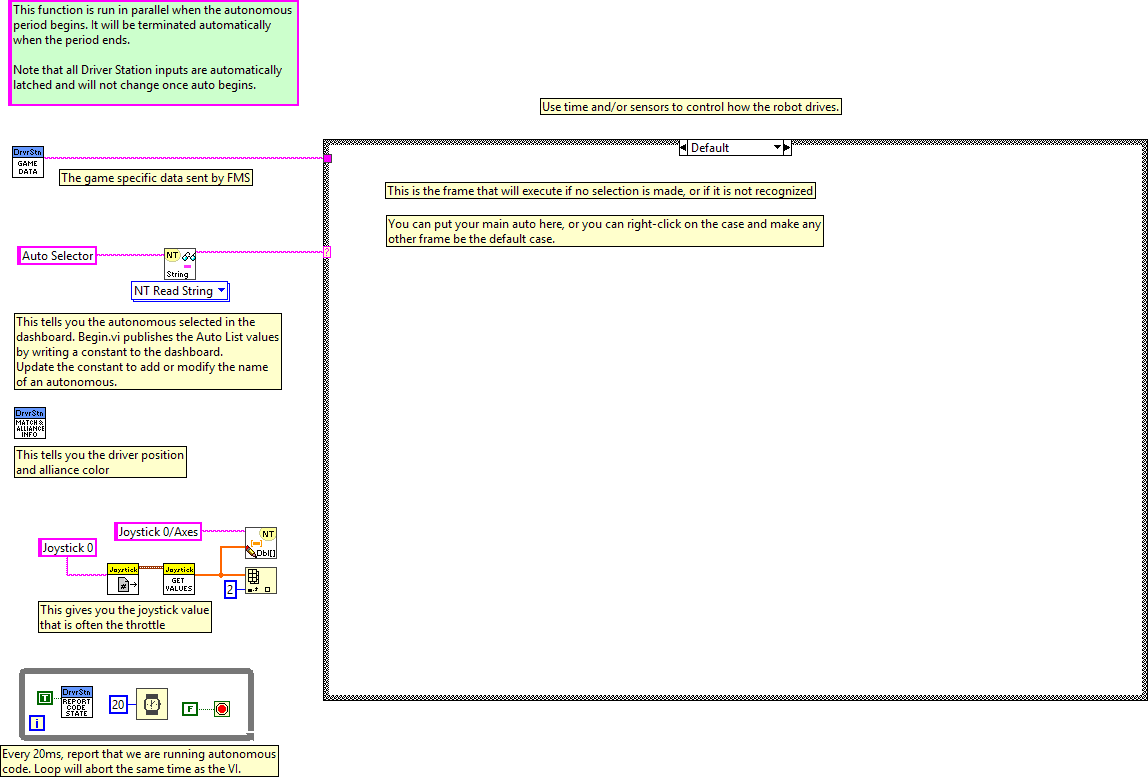
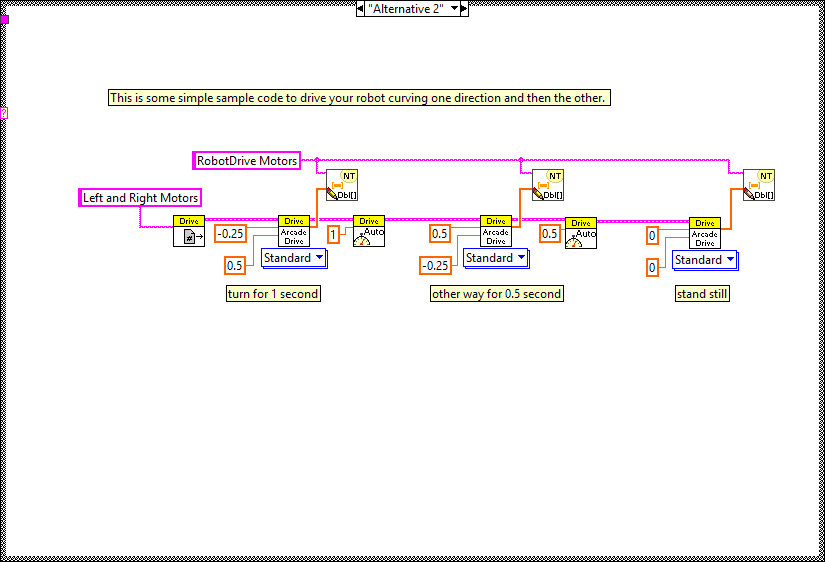
This VI is called when autonomous begins, and will automatically be terminated when autonomous ends. You can carry out timed or sensor driven robot movement independently without needing to return to the caller.
|
|
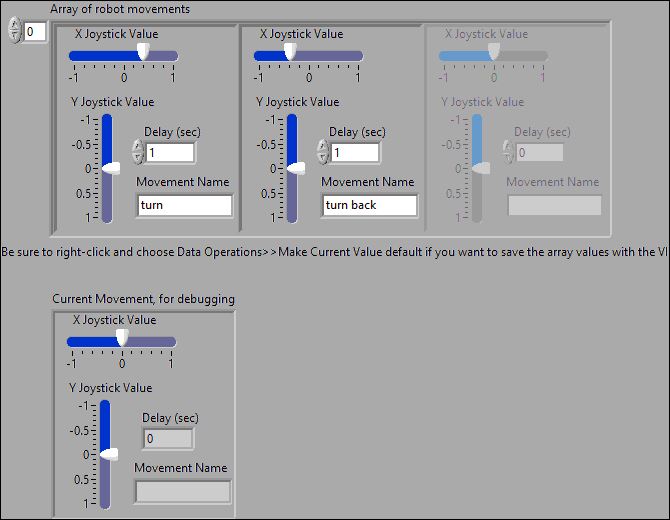
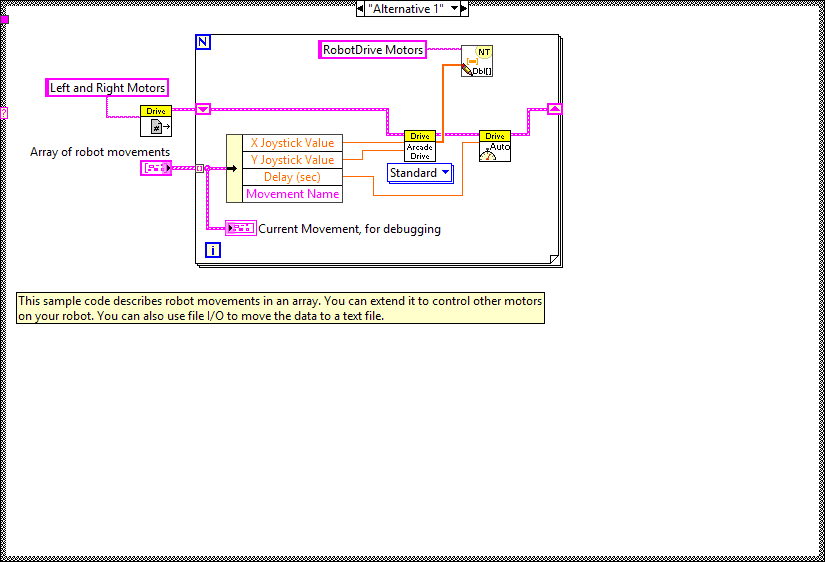
Array of robot movements |
|
|
Cluster |
|
|
X Joystick Value |
|
|
Y Joystick Value |
|
|
Delay (sec) |
|
|
Movement Name |
|
|
Current Movement, for debugging |
|
|
X Joystick Value |
|
|
Y Joystick Value |
|
|
Delay (sec) |
|
|
Movement Name |
"Autonomous Independent.vi History"
Current Revision: 91